Cognitive robotics toolkit
Aquila connected iCub experiments, neural-network tools, CUDA acceleration, and modular robot-research software.
SourcesOlder robotics work
Aquila was my GPU-accelerated toolkit for cognitive robotics: modular CPU-GPU software, neural-network experiments, and iCub research infrastructure from the Plymouth PhD period.
Why this page exists
Older references pointed to a Joomla article about Aquila. This page gives those links a focused replacement and keeps the current site anchored to the robotics sources.
Aquila connected iCub experiments, neural-network tools, CUDA acceleration, and modular robot-research software.
SourcesThe Aquila 2.0 architecture paper records the toolkit as reusable infrastructure for heterogeneous CPU/GPU cognitive robotics.
Open publication recordSourceForge preserves the project page, release files, and source history for Aquila.
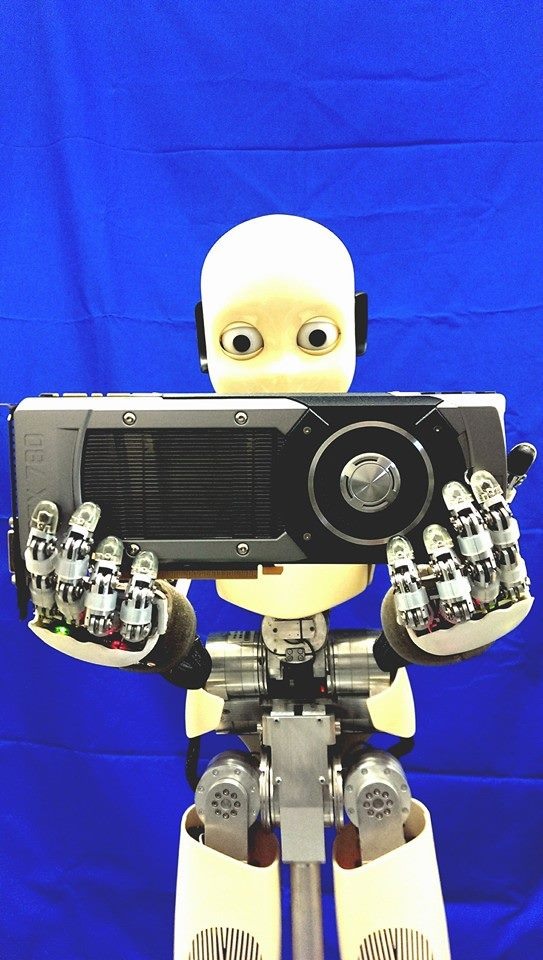
NVIDIA’s CUDA spotlight connects the same research period to GPU-accelerated humanoid robotics.
Open NVIDIA spotlight
Aquila archive
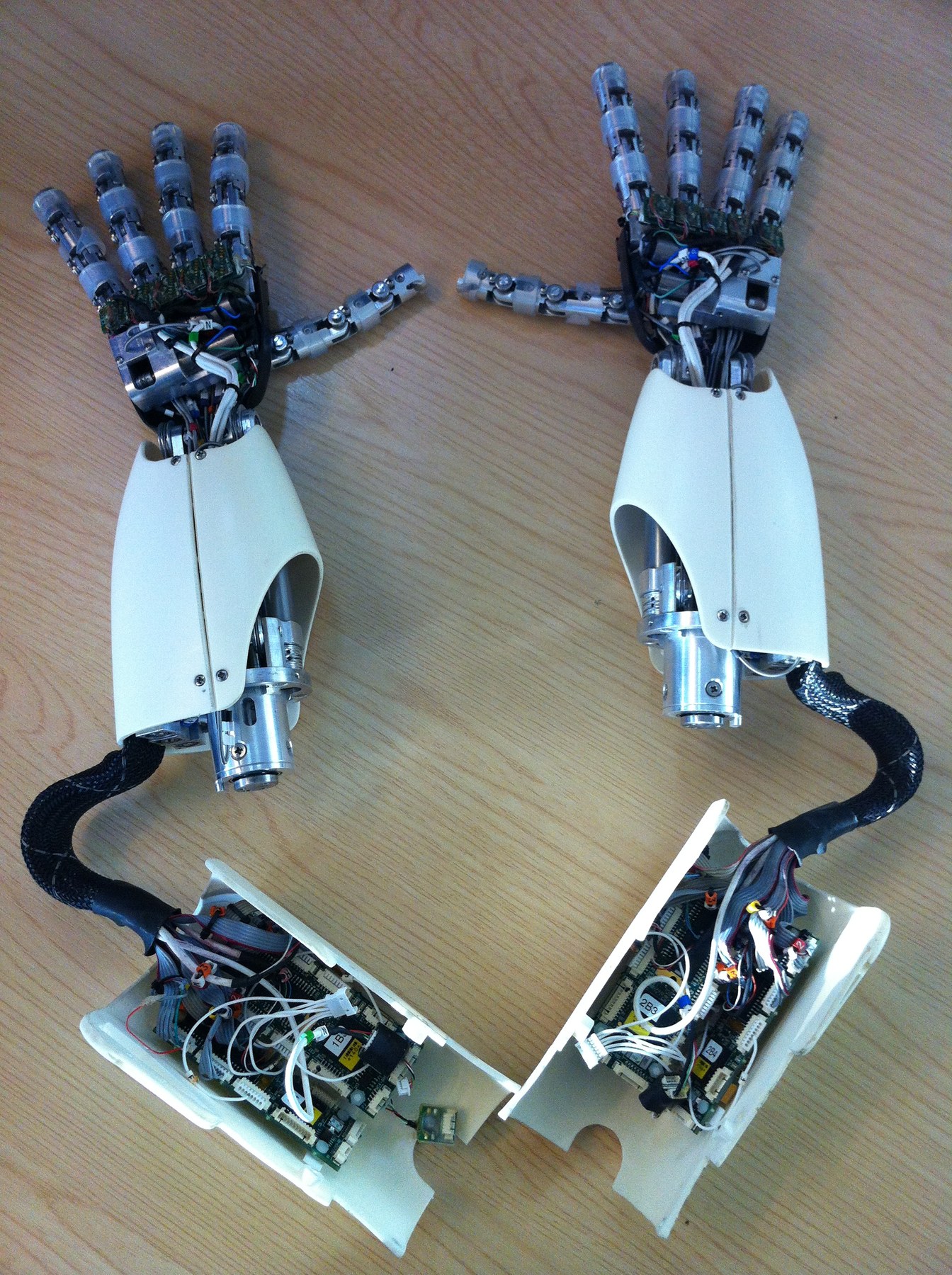
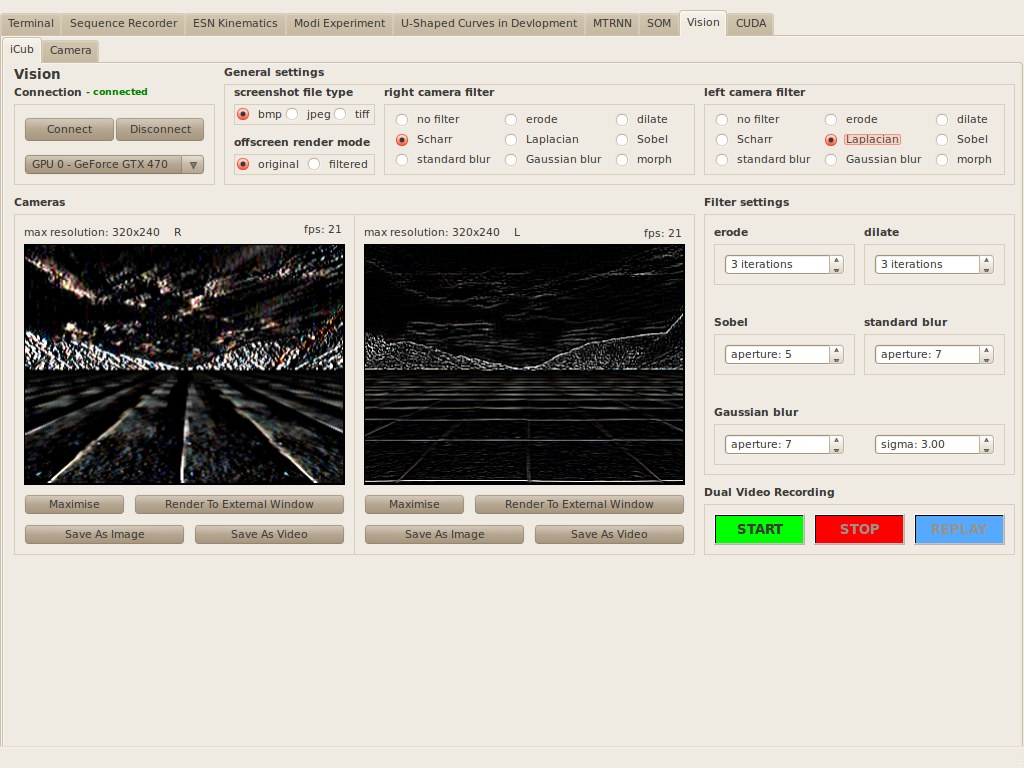
Aquila was not just a name in a publication list. It was the software layer that joined iCub experiments, CUDA acceleration, recurrent neural networks, camera filters, simulator modules, and teaching/research workflows.
Toolkit files
Small archive visuals from the Aquila/iCub period, kept to show the actual research machinery.
Archive source files
Metadata-stripped local archive copies for the older research period, alongside the public records already linked from the main source page.
IJCNN paper for the cognitive and neuro-robotics toolkit.
Open archive PDFICDL-era paper linking humanoid action, language, and embodied learning.
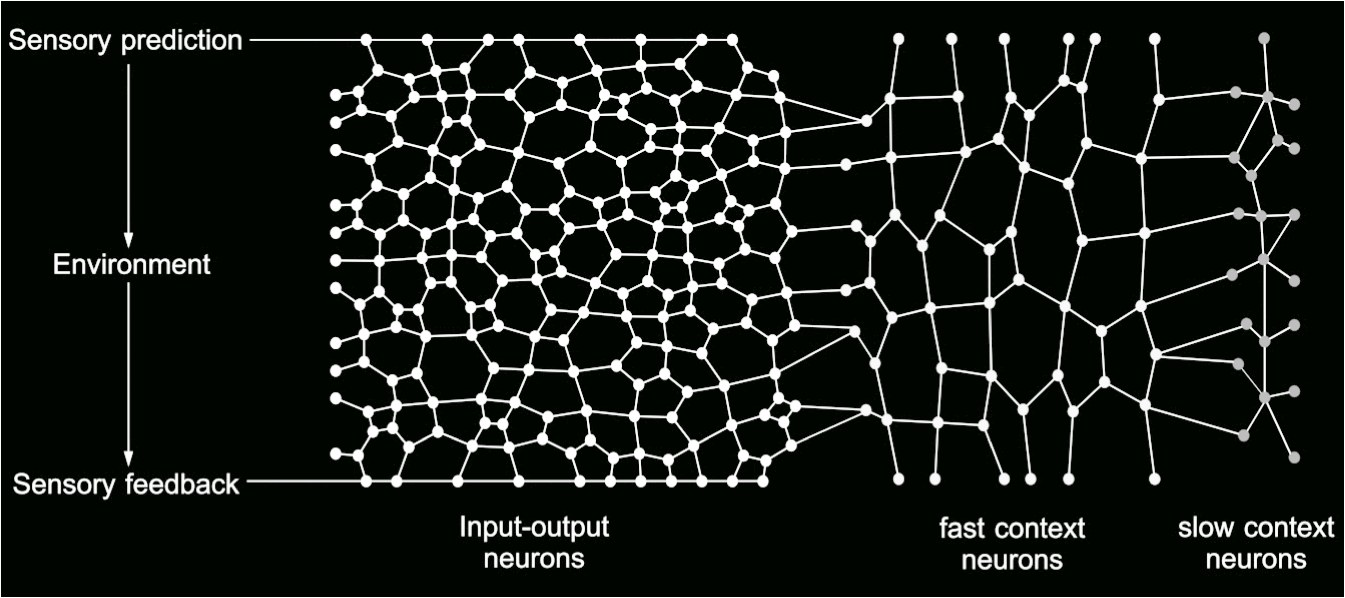
Open archive PDFIJCNN paper on multiple time-scales recurrent neural networks and GPU acceleration for action learning.
Open archive PDFGTC poster connecting iCub action acquisition, Aquila, CUDA, and measured GPU speedups.
Open archive PDFThe preserved slide deck for the NVIDIA GTC Express presentation on Aquila and cognitive robotics.
Open archive slidesICDL-era Aquila 2.0 paper on reusable cognitive-robotics software architecture.
Open archive PDF