Action, language, and embodiment
Connected iCub learning, recurrent neural networks, action-language research, and reusable CPU/GPU experiment infrastructure.
Robotics and GPU computing
This work was about making embodied AI experiments large enough to matter. iCub, Aquila, CUDA, and the rover work all came from the same pressure: perception, action, language, timing, and computation had to work together in one loop, at a scale worth testing.
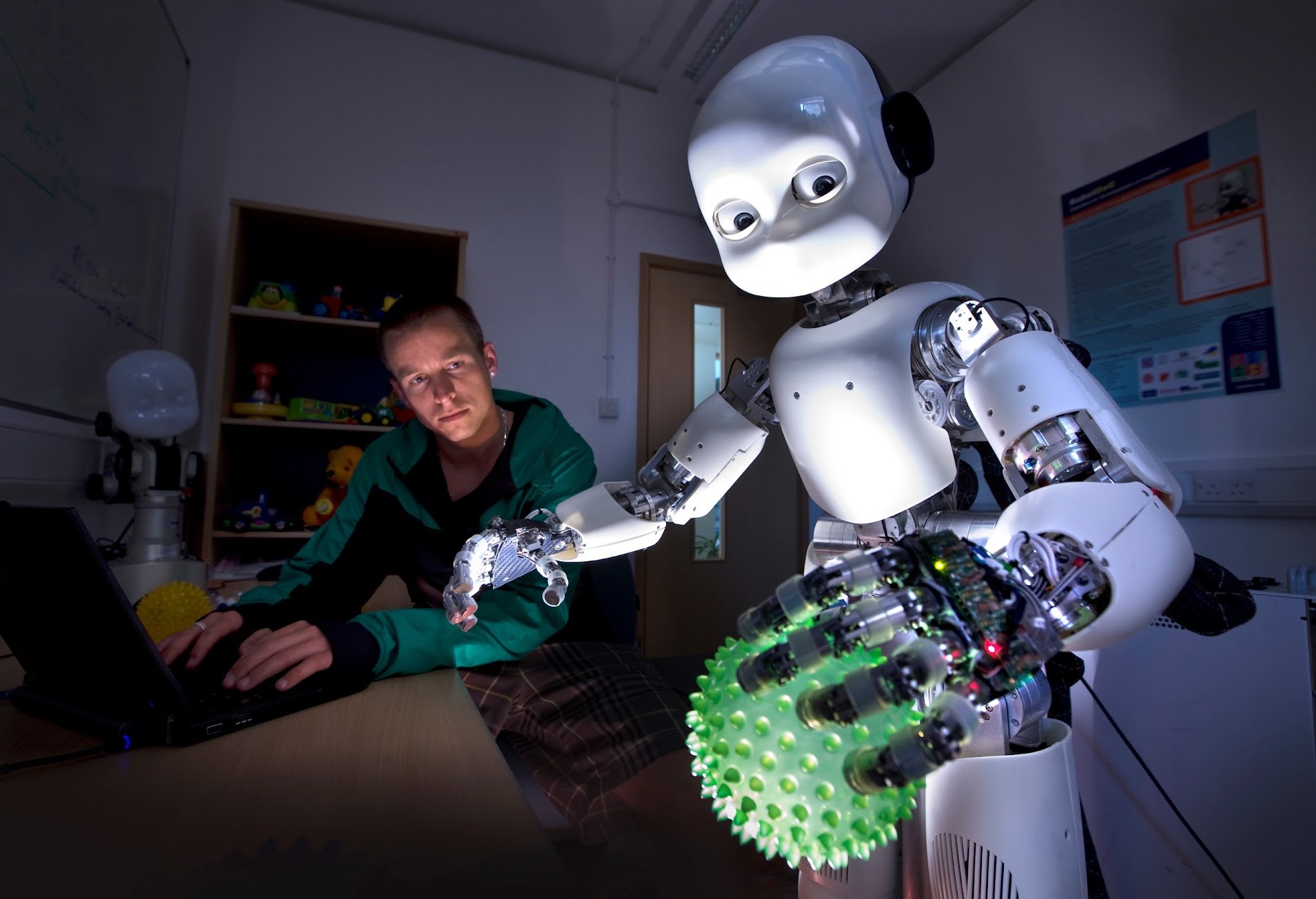
The visible objects are the iCub lab photographs, the bound PhD thesis, NVIDIA HQ and GTC records, Aquila source material, and ESA rover work.
Research line
Embodied learning needed larger experiments; Aquila and CUDA made them more practical; NVIDIA and ESA showed the work in public; the Plymouth research community made it real.
Connected iCub learning, recurrent neural networks, action-language research, and reusable CPU/GPU experiment infrastructure.
Embodied learning needed more practical iteration across sensing, action, simulation, timing, and larger neural models.
The work made cognitive-robotics experiments easier to run, teach, inspect, and accelerate.
The public links include the Plymouth thesis, NVIDIA CUDA spotlight, ESA rover material, SourceForge Aquila, and robotics media.
Research work
The work connected robot sensing, body control, recurrent neural networks, language grounding, simulation, and GPU acceleration. The important part was not one algorithm. It was the operating loop that made experiments possible.

Plymouth lab
This photograph places the work inside the Plymouth iCub lab with supervisor Angelo Cangelosi, colleagues, student and co-author Barry Bentley, and the robot at the centre. The thesis, Aquila tools, action-language videos, rover work, and GPU acceleration came from that living research environment.
Source links
Links and videos that show the robotics and GPU work rather than merely naming it.
Thesis
 NVIDIA HQ
NVIDIA HQ
 NVIDIA Santa Clara
NVIDIA Santa Clara
 NVIDIA GTC 2014
NVIDIA GTC 2014
 Aquila
Aquila
 ESA rover work
ESA rover work
 NVIDIA keynote
NVIDIA keynote
 Robotics
Robotics
 Rover simulation
Rover simulation
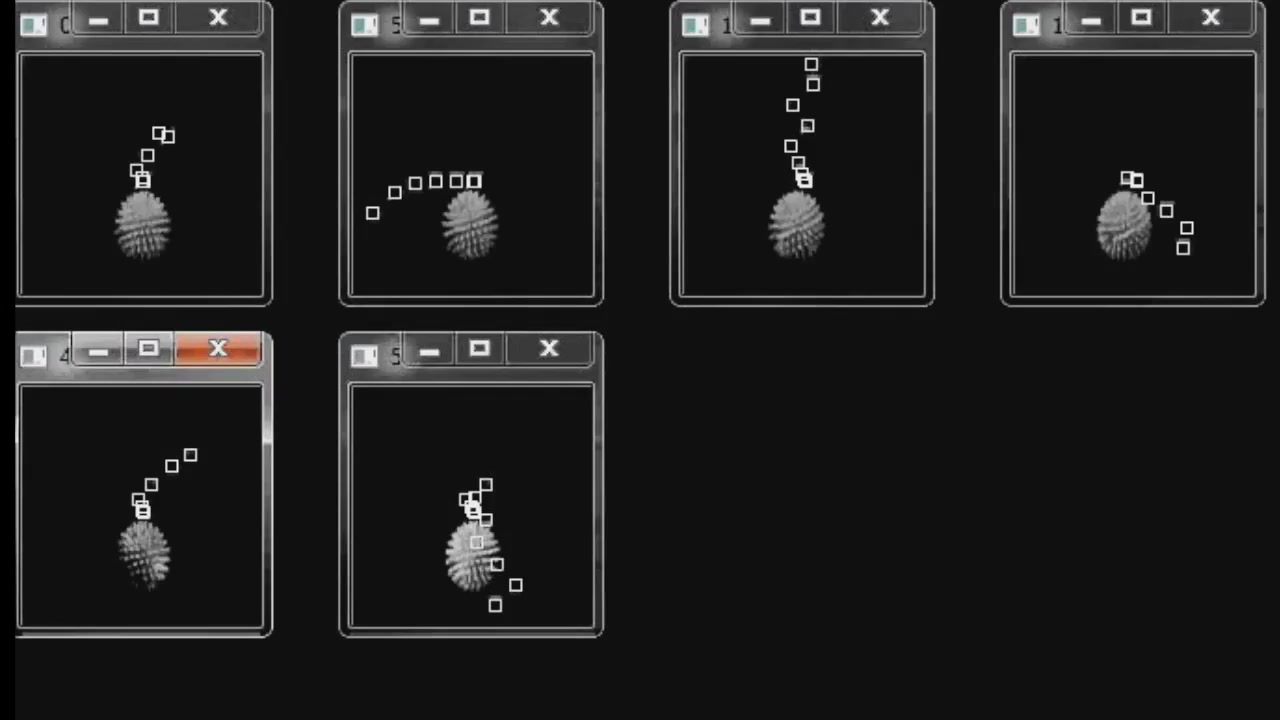
 Active vision
2011 talk
Active vision
2011 talk

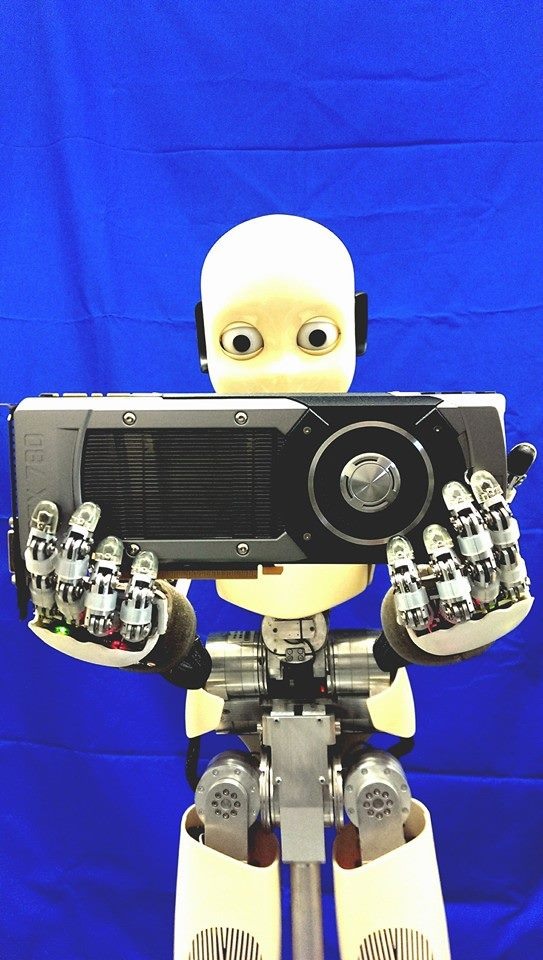
NVIDIA
The NVIDIA connection began before the later research placement: an invited Santa Clara HQ presentation on GPU-accelerated iCub work, documented by the NVIDIA welcome sign, followed by the CUDA spotlight, the GTC poster on action acquisition, the 2014 GTC presentation, and the SC11 keynote mention. Together they place the Plymouth iCub/Aquila work inside the early GPU-computing period before deep learning made that hardware shift familiar.
GTC 2014
This photograph shows the public presentation stage for the same line of work: Aquila, CUDA acceleration, iCub cognitive robotics, and the practical tooling needed to make larger embodied-learning experiments possible.
Selected publications
These entries stay visible because they support the robotics and GPU work.
PhD thesis, University of Plymouth. The thesis that held together the iCub, action-language, vision, and GPU acceleration work.
Open thesisReusable CPU/GPU software architecture for cognitive robotics experiments.
Open publication recordNVIDIA GTC poster from the pre-CNN-boom GPU-compute era: iCub action acquisition with multiple time-scales recurrent neural networks, Aquila, CUDA, and measured GPU speedups.
Open GTC posterRobotika.SK/STU Bratislava talk page preserving the abstract for the iTALK/iCub action-language work.
Open Robotika.SK talk pageESA-hosted paper on autonomous navigation, rover simulation, and neuro-controller optimization.
Open ESA paperIndependent bibliographic and research-profile trails for additional publications and citation discovery.
Why it still matters
When an experiment takes too long, the research question quietly shrinks. GPU acceleration and reusable tools widened the space of possible robotics experiments. That concern with practical constraints later reappears in edge cameras, synthetic scenes, and spatial calibration.
Follow the line into spatial intelligence