Views share a physical frame
Camera observations become stronger when they can be compared inside one known world instead of remaining separate image fragments.
Spatial intelligence
This chapter begins where a camera result is no longer enough: an observation has to belong somewhere.
The concrete objects are Generator and the six-view fused-cloud precursor: known cameras, controlled truth, and many views treated as one physical scene.
 View precursor
View precursor
Spatial shift
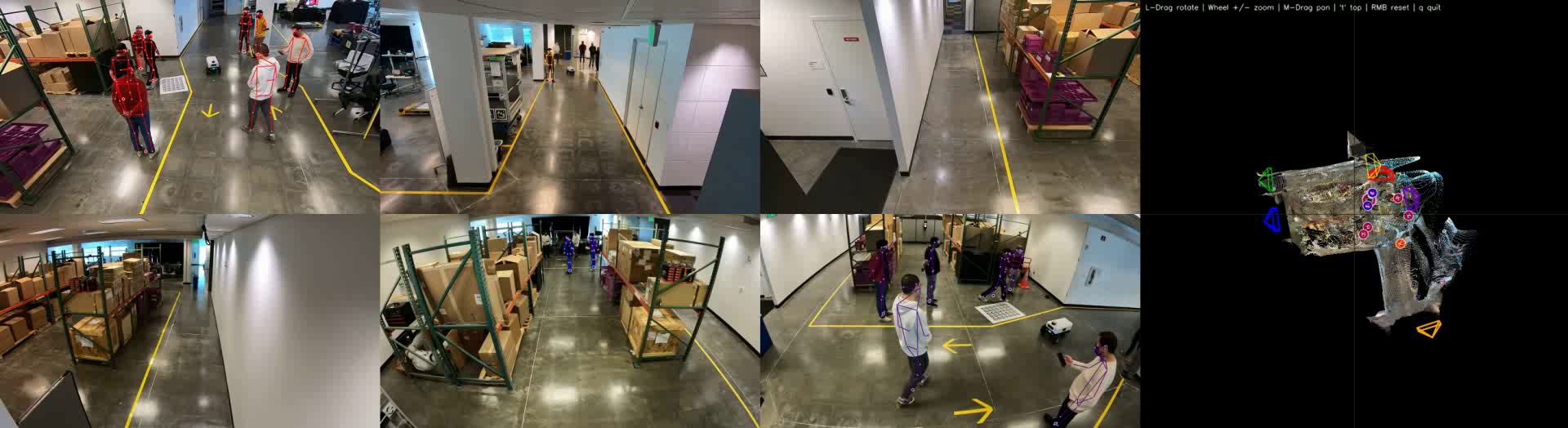
Object: six calibrated views fused into one scene. The point was not a prettier image; it was whether separate cameras could be made to answer to the same floor, time, topology, and uncertainty.
Spatial intelligence begins when a detection stops being only an image event and becomes an observation somewhere in the world, with geometry, time, and error attached. The task is not merely to recognise what is in a frame, but to decide where it could physically be.
Camera observations become stronger when they can be compared inside one known world instead of remaining separate image fragments.
A place-aware observation is more honest when confidence, calibration limits, and physical plausibility remain attached.
Generator belongs here because controlled worlds make cameras, calibration, geometry, and ground truth repeatable enough to study.
Fused view
The six-view poster is the central image for this work. It shows how a scene can be tested against physical position and plausibility.
Objects
The path is simple: a fused-view precursor showed why many cameras need one shared frame; Generator made known camera truth repeatable; later work kept place, topology, timing, and uncertainty attached to what the system saw.
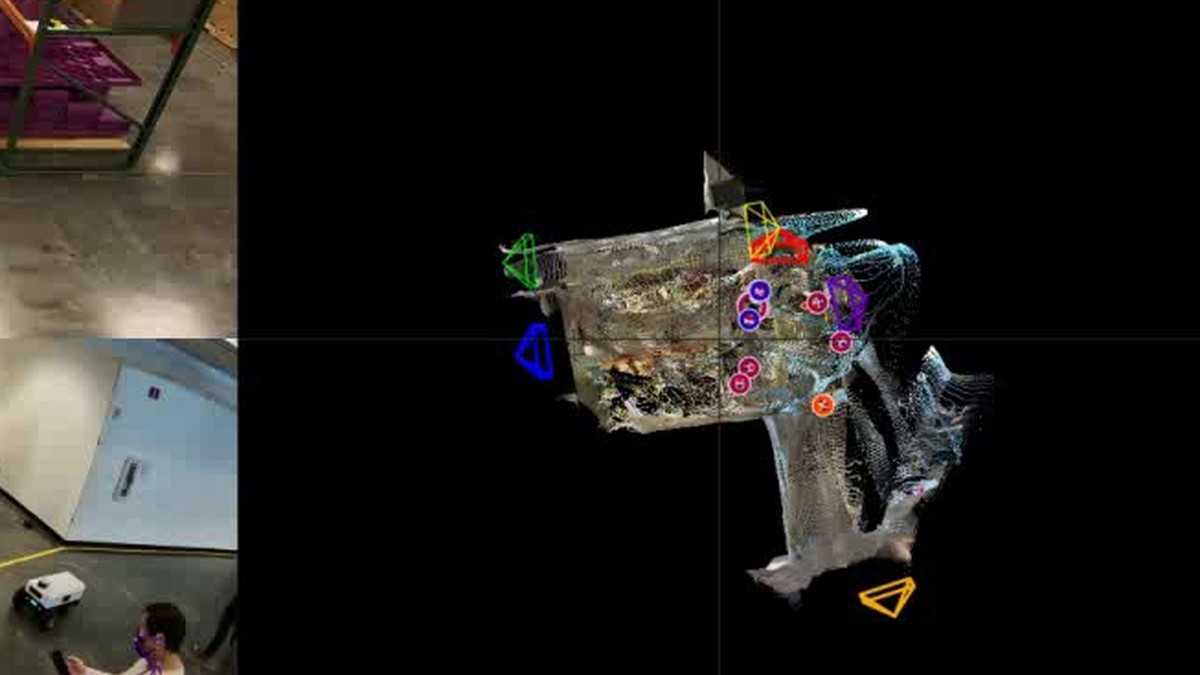
The fused-cloud poster shows the older spatial problem clearly: several views should describe the same physical world.
View the six-camera fused-cloud precursorGenerator made spatial experiments repeatable by putting camera parameters, geometry, and ground truth inside controlled worlds.
Watch GeneratorThe later direction is not just detecting objects, but keeping place, topology, timing, and uncertainty attached to what the system sees.
Read AI camerasInspect next
This work sits between applied camera systems, synthetic worlds, robotics roots, and the fused-view precursor.
Synthetic worlds make calibration and perception experiments repeatable because camera parameters and ground truth can be known.
Watch GeneratorCortexiCAM and edge inference connect camera hardware to real-world perception constraints.
Read AI camerasThe poster frame shows the precursor: many camera observations treated as one shared physical problem.
View the six-camera fused-cloud precursorThe robotics work is the older context: perception tied to bodies, action, timing, and measurable constraints.
Read robotics and GPUA detection is useful. A detection with place, time, topology, and error is easier to inspect.