CortexiCAM / Myriad-X
A camera-side prototype where the constraint was immediate: limited compute, real lighting, latency, and a small device that still had to make perception visible.
AI cameras
After robotics, the same discipline moved into cameras: edge devices, awkward lighting, latency, real rooms, and the need to make perception useful outside the lab.
The visible objects are CortexiCAM / Myriad-X, the UP Board edge-computing article, camera-year films, Generator, and the six-view fused-cloud precursor.
 Watch demo
Watch demo
Camera work
Each object keeps the line from robots to cameras to coordinates physical.
A camera-side prototype where the constraint was immediate: limited compute, real lighting, latency, and a small device that still had to make perception visible.
Entrance and monitoring films turned camera output into states a person could inspect in the room, not just scores in a notebook.
Known cameras and synthetic truth made experiments repeatable, then led naturally toward shared coordinates and fused-view spatial reasoning.
Timeline
The useful history is not a job-title list. It is the move from lab perception into hardware, real rooms, synthetic scenes, and eventually shared coordinates.
The work moved from embodied AI research into computer vision under commercial constraints.
Prototyping, edge inference, mobile ML, AR/VR experiments, and camera-as-computer objects.
Edge inference, public films, and practical objects that made vision legible in physical rooms.
Synthetic-world tools and multi-camera thinking became a practical move toward spatial intelligence.
Working pattern
The applied vision work kept the robotics habit of respecting hardware, lighting, latency, data gaps, and the need for working systems.
Representative scenes
Three scenes make the AI camera period easier to read as lived work.
The question moved into the camera body itself: limited compute, uneven light, latency, and a small edge device that still had to make perception visible without a lab machine beside it.
Watch CortexiCAMA physical room had to be readable to people, not just accurate in a notebook. The work was to turn camera output into visible states that made sense where the camera was being used.
Watch room-state filmSome experiments needed a world where the camera positions and truth were known. Generator kept the work measurable when real data was scarce, expensive to label, or impossible to repeat exactly.
Watch GeneratorVideos
The core objects show what this period contributed: hardware limits, edge inference, synthetic truth, and the bridge from cameras toward coordinates.
 Overview
Overview
AI camera demos from the Cortexica innovation period.
AI camera
Myriad-X edge camera prototype in camera-as-computer form.
 Room state
Room state
Entrance states made visible in a real room.
 Article
Article
Guest article connecting GPU robotics, Movidius AI Core, UP Squared, and edge inference.
 Generator
Generator
Synthetic scenes with known cameras and controllable ground truth.
 Spatial precursor
Spatial precursor
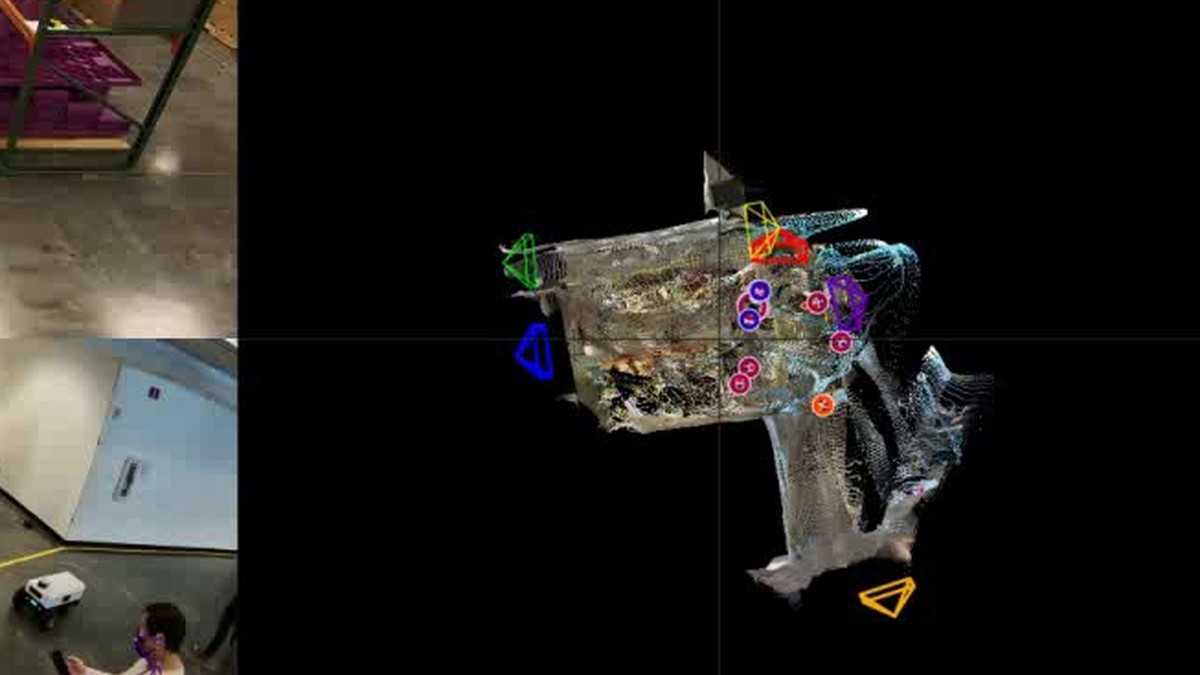
Six calibrated angles forming one shared spatial object.
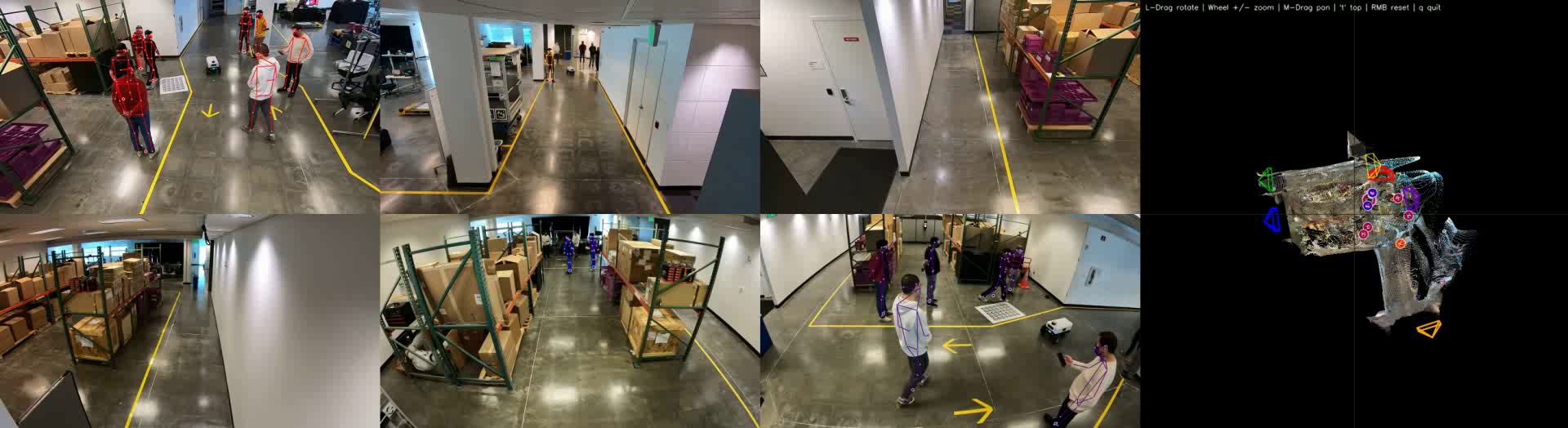
Toward spatial intelligence
The six-view fused-cloud precursor connects the camera work to later spatial calibration: multiple overlapping views treated as one physical scene.
Read spatial intelligence
