Talks and videos
Talks, demos, and films.
Videos following the same line as the site: origin, robots, cameras, coordinates, and place.

Featured talk – TEDx Bratislava 2014
Start with this one.
TEDx Bratislava, 2014. The clearest public talk in the archive. If you watch one film here, start with this one.
Origin and story
Where the story found an audience.
These videos and articles show the human arc: arriving in Plymouth, rebuilding through study, and later articulating the dream on stage.
 Plymouth
Plymouth
Interview when I first started BSc Computing
2000s – Plymouth – origin record. Early public glimpse of the student route before robotics.
My dream about AI
2014 – TEDxBratislava – public talk. The clearest public account of the robot dream and the larger life story.
 Media
Media
Appearance on The Geek Files Show
Public media record from the robotics and GPU years.
Robotics, Mars, active vision
Machines learning through body, action, and place.
The research work: humanoid robotics, rover simulation, active perception, and software that made experiments visible.
 Science Museum
Science Museum
Connecting actions with language
iCub action-language video shown in the London museum display.
 ESA / Mars
ESA / Mars
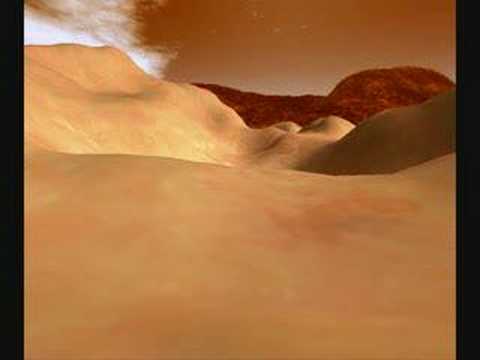
MSL rover and ODE, autonomous progress
2009-2010 – rover simulation – research demo. Terrain, sensing, and autonomy before the iCub period took over.
 NVIDIA keynote
NVIDIA keynote
GPU robotics research mentioned at SC11
2011 – NVIDIA – public keynote mention. GPU robotics visible in the wider CUDA story.
More robotics filmsOpen supporting demos
 Robotics
Robotics
University of Plymouth Robotics
 Humanoid robotics
Humanoid robotics
iCub controlled by complex neural networks
 Simulation
Simulation
MSLS: Mars Science Laboratory Simulation
 Research
Research
Active Vision
 Active vision
Active vision
MSLS – Active Vision Project
 Aquila
Aquila
iCub teleoperation
 Aquila
Aquila
Recurrent neural network on iCub
 Rover
Rover
AUROX autonomous rover exploration
 Applied AI
Applied AI
AICore
Cortexica and applied vision
From research vision to applied AI cameras.
These films show the camera years becoming physical: hardware on desks, inference on edge devices, rooms under awkward lighting, and the discipline of making vision survive contact with the world.
 Overview
Overview
The Path of Innovation
 AI camera
AI camera
CortexiCAM – AI cameras based on Myriad-X
Camera-years object: edge inference moved into the camera body.
 Edge AI
Edge AI
AI at the Edge
 Room state
Room state
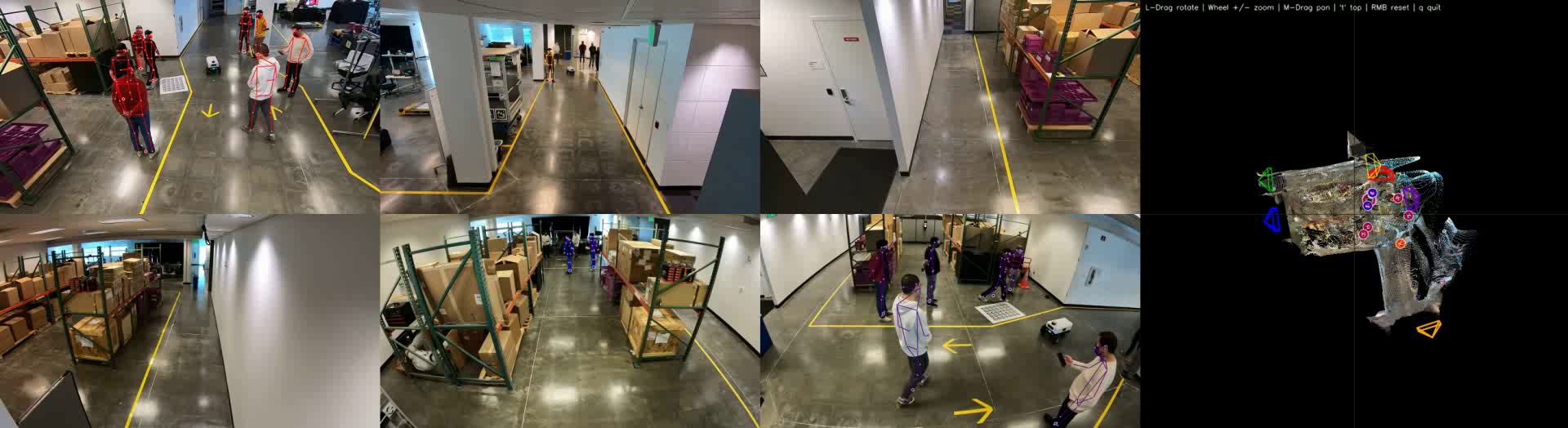
Axis Experience Centre demo
Camera-years room record: visual states made legible under real conditions.
More applied vision filmsOpen supporting demos






Spatial intelligence and synthetic worlds
Cameras learning where things are.
Generator and the six-view precursor mark the move from camera outputs to shared spatial understanding: known cameras, controllable truth, and observations that can belong to the same world.

Tao
Tao, built over years.
Three highlights stay here as the bridge from talks and demos into place. The fuller Tao film selection lives on the dedicated Project Tao Films page.



Observation
Astronomy, optics, and observation.
The astronomy videos stay because they belong to the same older habit as cameras and coordinates: looking carefully, locating things in space, and sharing curiosity in public.


