Robotics + GPU
Action, language, and acceleration
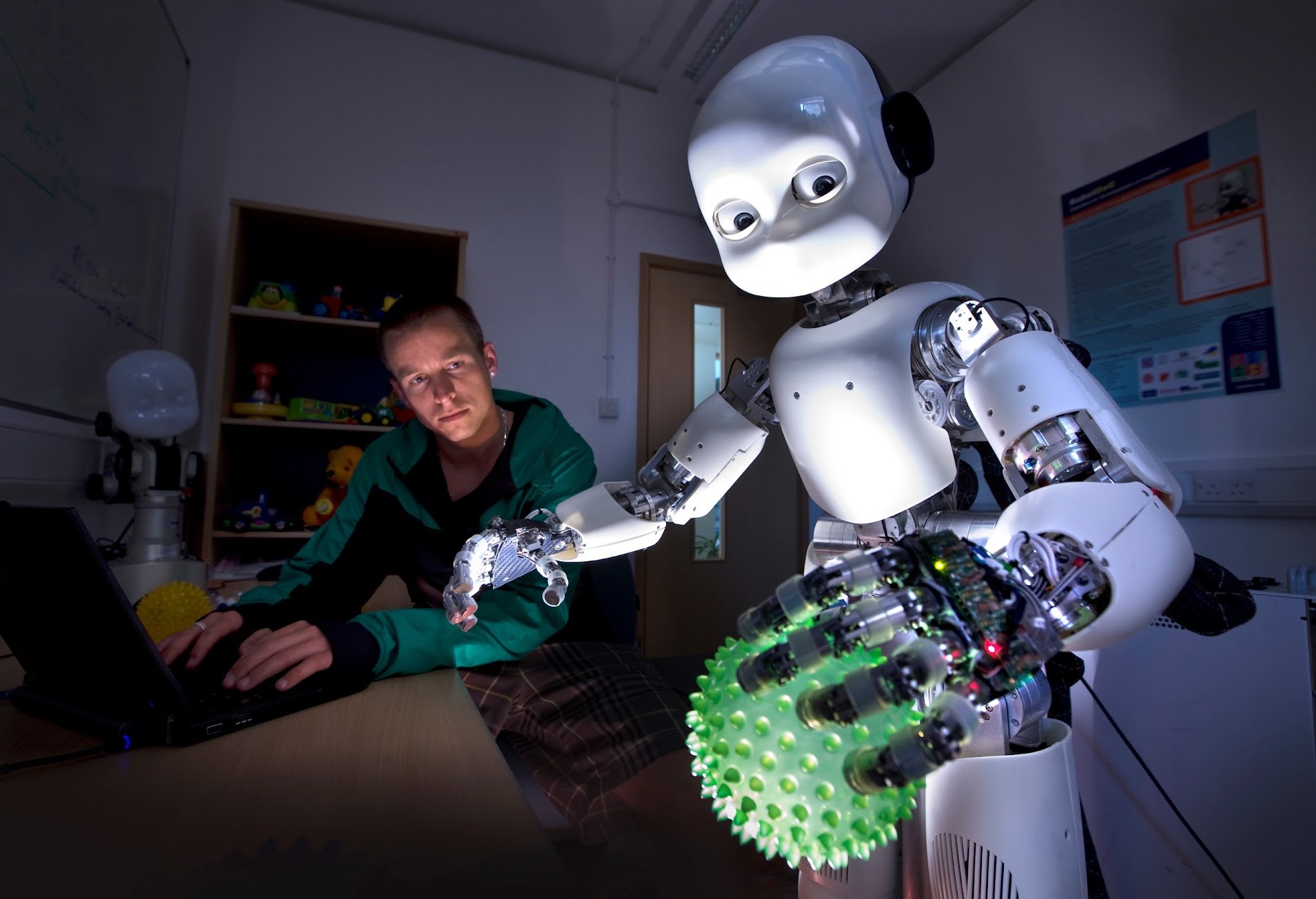
PhD work connecting iCub humanoid learning, action structure, neural networks, CUDA, Aquila, and ESA rover-control research.
Robotics folderGPU computing · AI · cognitive robotics
An early pioneer in applying GPU computing to cognitive robotics.
Before GPU deep learning became mainstream, his work used CUDA to scale recurrent neural networks for the iCub humanoid robot. Alongside that work, he developed evolutionary rover controllers in a University of Plymouth–ESA collaboration, presented cognitive-robotics applications at NVIDIA HQ in 2011, and joined NVIDIA as a research intern in Silicon Valley in 2012.

I created this archive to keep the life, the work, and the places connected: robotics, GPU computing, camera technology, spatial mapping, public talks, older writing, and a place built slowly over years.

TEDx Bratislava
TEDx Bratislava brought the route into public view: Plymouth, study, robotics, GPU computing, gratitude, and the dream of embodied AI.
Watch TEDxBegin here
Archive routes
Story gives the life context. Work holds the chapters. Talks keep the public voice. Milestones keep the objects. Sources keep the record. Writing preserves the old voice.
Work
The chapters move from research robots to applied cameras, spatial maps, and a real place shaped slowly over time.
Robotics + GPU
PhD work connecting iCub humanoid learning, action structure, neural networks, CUDA, Aquila, and ESA rover-control research.
Robotics folder
AI cameras
Camera-as-computer prototypes, edge inference, synthetic worlds, and the pressure of making ideas work outside the lab.
AI cameras record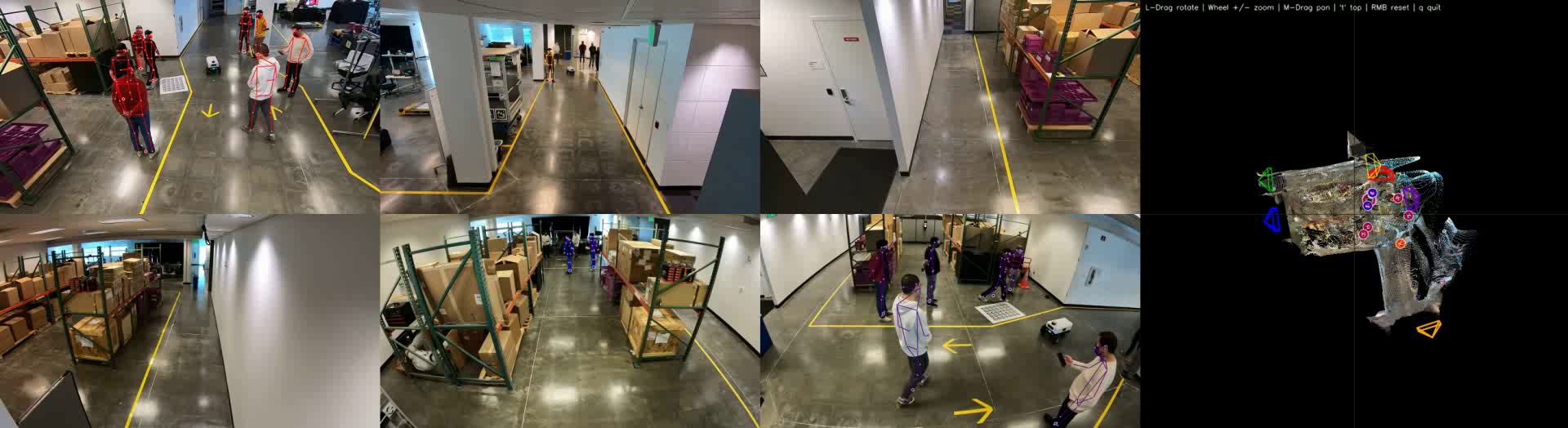
Spatial intelligence
Multi-camera calibration, floorplane reasoning, uncertainty, topology, and the work of making observations belong to the same world.
Spatial recordTao
Tao records the long work of making rough land usable: water, paths, planting, structures, seasons, and care.
Over years, rough land became water, paths, planting, structures, and care.
Lineage
The tools changed from rover simulators and humanoid robots to camera systems, mapped spaces, and land. The test stayed physical: ideas had to work in labs, rooms, landscapes, and weather.
Autonomy and sensing against terrain, uncertainty, and planetary-robotics constraints.
Action, language, neural dynamics, body constraints, and GPU-accelerated experiments.
A 2011 NVIDIA HQ presentation, 2012 research internship, CUDA Spotlight, and GTC records made the early GPU robotics work visible.
Perception systems moved outside the lab into edge devices, workflows, and real-world pressure.
Cameras become more useful when observations share coordinates, topology, and uncertainty.
Land, water, paths, structures, seasons, repair, and memory.