2008-2014
Robotics and GPU research
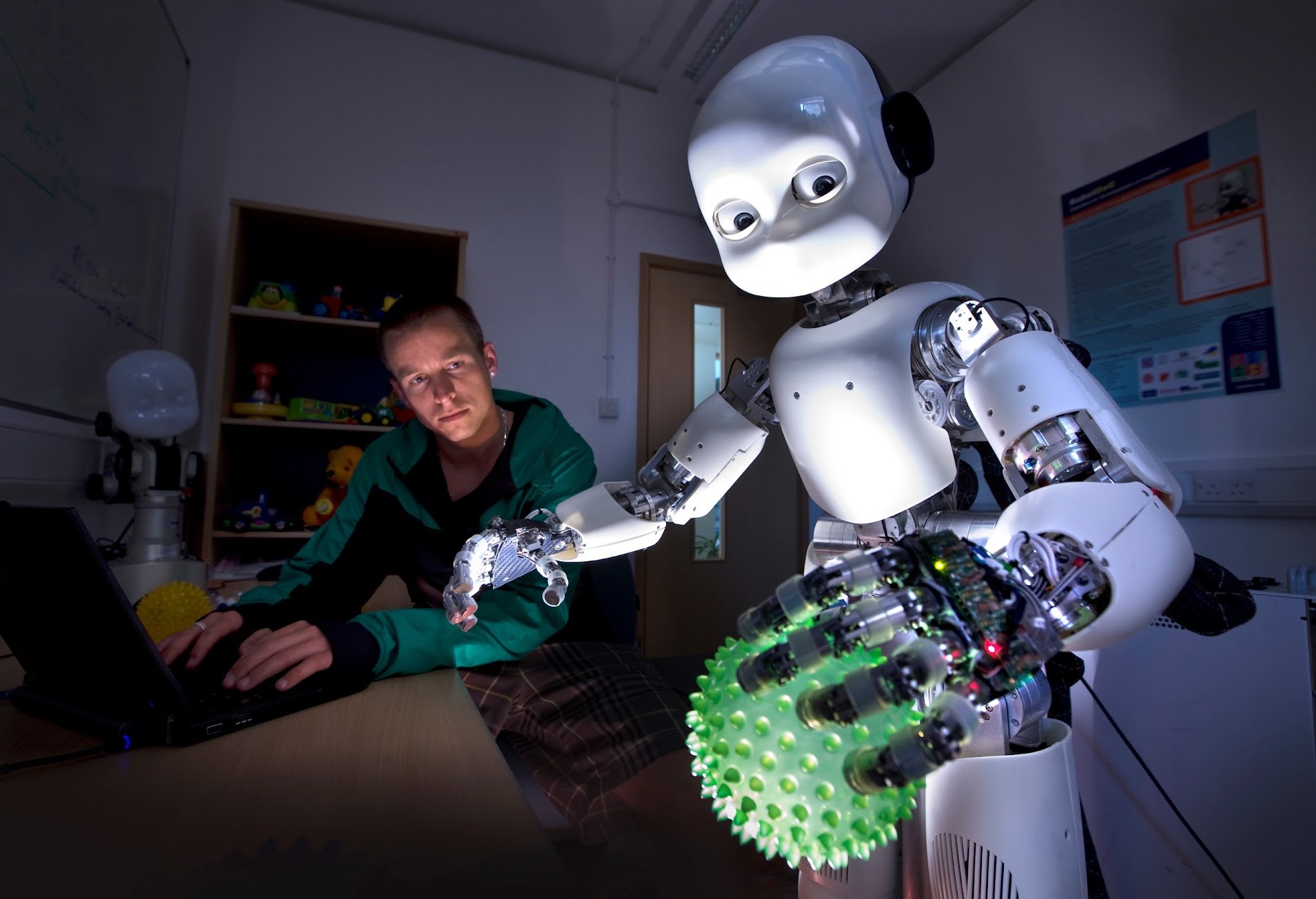
Embodied learning with the iCub robot, GPU acceleration, Aquila, CUDA teaching infrastructure, and ESA rover simulation.
Robotics folderWork
Robots made perception answer to action. Cameras made it answer to real rooms. Coordinates made observations share a world. Tao made the same habit answer to land.
2008-2014
Embodied learning with the iCub robot, GPU acceleration, Aquila, CUDA teaching infrastructure, and ESA rover simulation.
Robotics folder
2014 onward
Camera-as-computer prototypes, edge AI, synthetic worlds, and the bridge toward spatial perception.
AI cameras record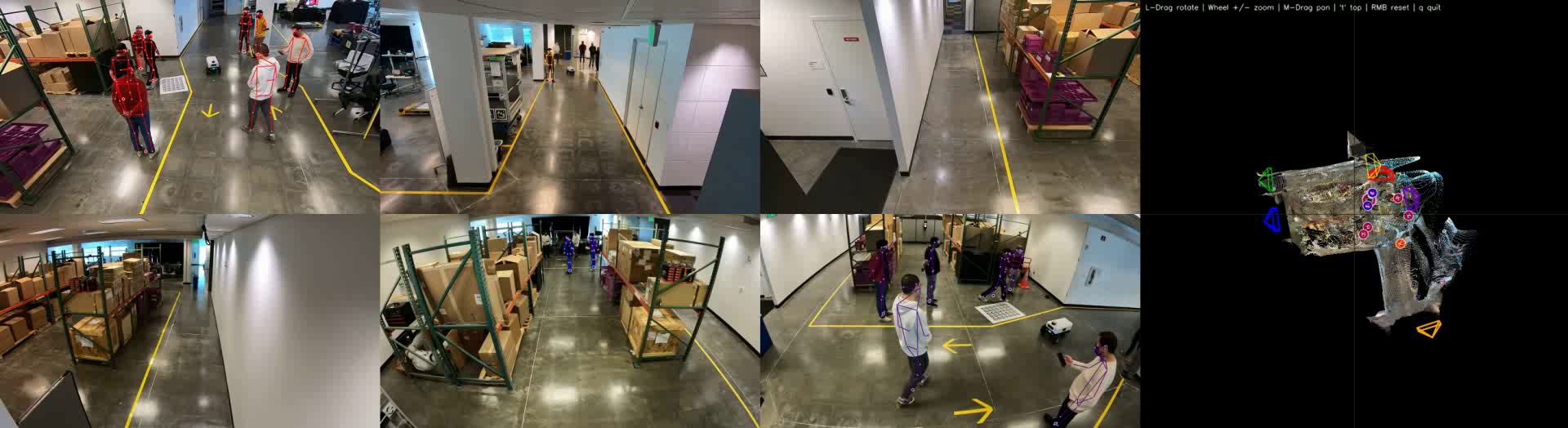
Spatial intelligence
Helping observations share a physical frame: position, timing, topology, uncertainty, and physical context instead of isolated pixels.
Spatial record
Place
A place built slowly from rough land, where paths, water, structures, gardens, weather, and return become part of long-term care.
Tao recordHow it connects
The chapters changed tools, scales, and methods: rover simulation, iCub learning, CUDA, edge cameras, shared coordinates, and finally Tao.