Evolution in Robotic Islands
ESA lists Martin Peniak among the study participants; the University of Plymouth lists him with Angelo Cangelosi and Davide Marocco as the project leads.
ESA rover work
A preserved summary of the open-source rover simulator and ESA work on autonomous rover control, active vision, and island-model optimization for planetary robotics.


ESA rover test setting
This photograph shows Martin Peniak at ESA with the rover research platform used in the Mars rover collaboration, linking the simulation, active-vision, and controller work back to a tangible test environment.

Collaboration context
This photograph places the Mars rover simulation and active-vision work inside the collaboration around Evolution in Robotic Islands, where simulated planetary robotics, sensing, and neuro-controller research met a physical rover-test setting.
ESA ACT / Noordwijk
This 2010 photograph shows Martin Peniak with colleagues at ESA ACT in Noordwijk during the Mars rover collaboration, with the simulator work visible on the screen behind the group.

Short note
The old page was linked from developer discussions. This replacement keeps the technical history visible while pointing to primary research sources.
ESA lists Martin Peniak among the study participants; the University of Plymouth lists him with Angelo Cangelosi and Davide Marocco as the project leads.
The surviving SourceForge record preserves the simulator files and source history behind the terrain, sensing, and controller experiments.
Public research article on the Plymouth and ESA collaboration, Mars Rover Simulator, active vision, and island-model controller design.
Open ERCIM articleFinal study report for the ESA Advanced Concepts Team collaboration on simulated rover controllers and island-model evolution.
Open permanent source recordESA-hosted paper on autonomous navigation, rover simulation, and neuro-controller optimization.
Open ESA paperRelated workshop paper on camera control, unknown terrain, and rover navigation under physical uncertainty.
Open workshop paperThe rover work sits beside the iCub, Aquila, and GPU-computing work.
Read robotics work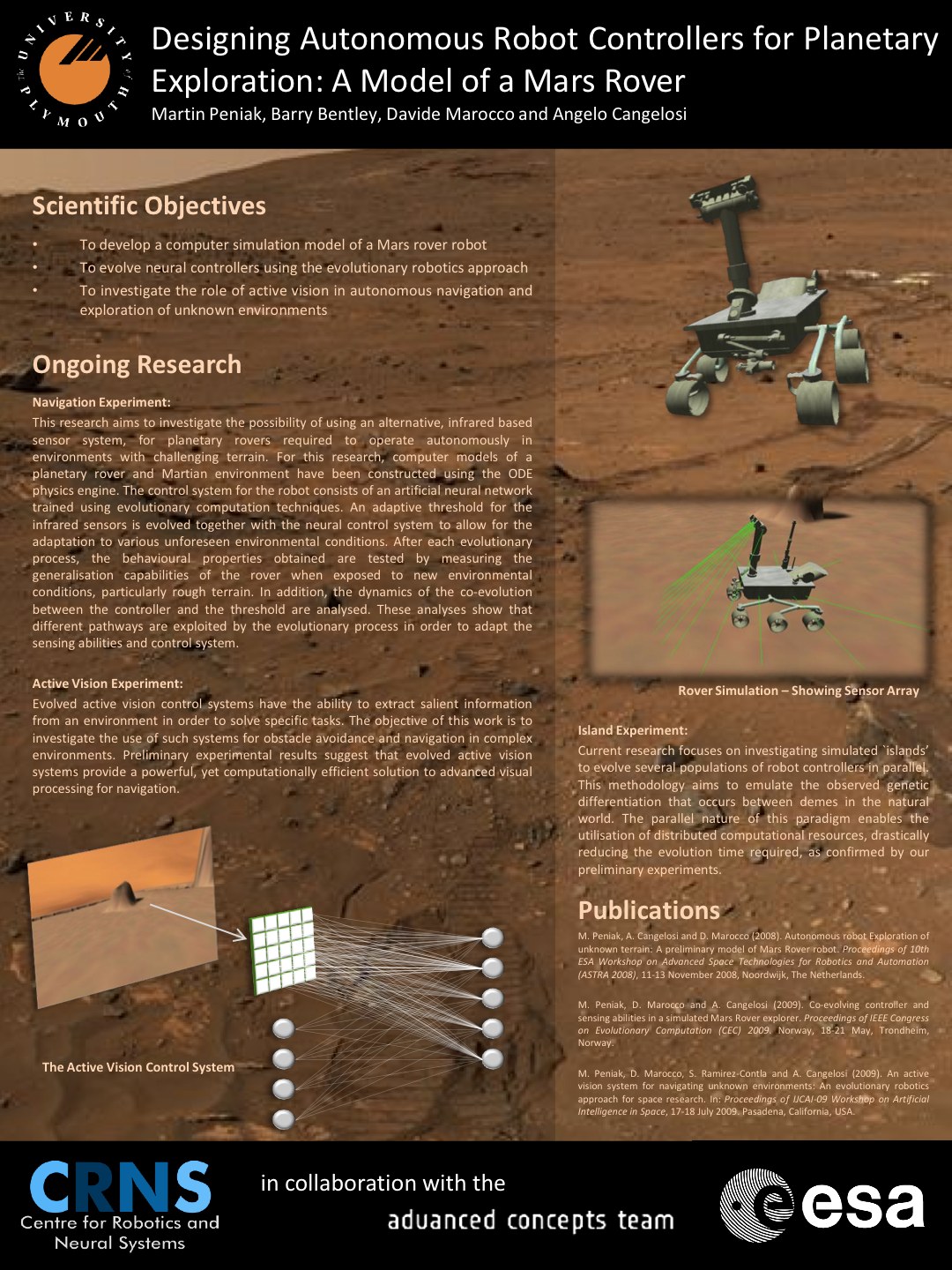
Archive artifact
This poster and the related archive papers preserve the line from simulated rover control to active camera movement, controller evolution, and ESA-linked planetary robotics.
Legacy simulator
The old simulator interface is kept as a small artifact because it shows the practical working surface behind the papers: terrain, robot state, and controller experiments.
Archive copies
Metadata-stripped archive copies for older references that are harder to find from current search.
Preliminary Mars rover model presented at the 10th ESA ASTRA Workshop in Noordwijk, 11-13 November 2008.
CEC-era rover paper on evolving controller and sensing behaviours in simulation.
Local archive PDFIJCAI workshop paper connecting camera control, rover navigation, and unknown environments.
Open archive PDFIJCNN paper on evolving neuro-controllers for planetary rover control.
Open archive PDFTAROS paper on active vision and navigation under physical uncertainty.
Open archive PDFOne-page archive copy for the rover-control paper that received the PCCAT best paper award.
Open archive PDF